数据通信基础
串行/并行通信

单工/半双工/全双工通信

同步/异步通信

波特率

常见通信接口
| 名称 |
引脚 |
双工 |
时钟 |
电平 |
设备 |
| USART |
TX、RX |
全双工 |
异步 |
单端 |
点对点 |
| I2C |
SCL、SDA |
半双工 |
同步 |
单端 |
多设备 |
| SPI |
SCLK、MOSI、MISO、CS |
全双工 |
同步 |
单端 |
多设备 |
| CAN |
CAN_H、CAN_L |
半双工 |
异步 |
差分 |
多设备 |
| USB |
DP、DM |
半双工 |
异步 |
差分 |
点对点 |
串口
概念

RS232 VS CMOS/TTL

串口参数及时序

RS232通信


USB通信

电平的区别

USART
简介

主要特征

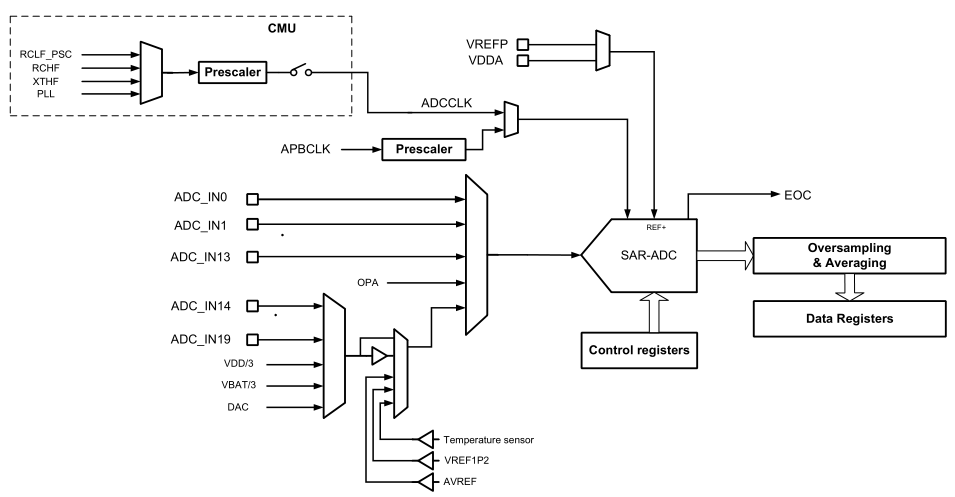
框图
串口数据低位先行

框图简化版


数据帧
这里的字长就是数据位长度,空闲帧和断开帧是局域网协议用的,我们的串口用不到

停止位分别为1、1.5、2、0.5,意思就是0.5个时长

要保证在采样的时候,数据在时钟边沿的中间,这样可以保证数据的可靠性

设置波特率
波特率的产生实际上就是一个预分频的过程,这里的16就是上面的内部还有一个16倍的采样时钟



数据模式

实验
简单的发送数据
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
|
void serial_init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = SERIAL_TX_PIN;
GPIO_InitStruct.GPIO_Speed =GPIO_Speed_50MHz;
GPIO_Init(SERIAL_PORT,&GPIO_InitStruct);
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate = 115200;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART2,&USART_InitStruct);
USART_Cmd(USART2,ENABLE);
}
void serial_sendByte(u8 byte)
{
USART_SendData(USART2,byte);
while(USART_GetFlagStatus(USART2,USART_FLAG_TXE) == RESET);
}
void serial_sendArray(u8 *array,u16 length)
{
for(u16 i = 0; i < length; i++){
serial_sendByte(array[i]);
}
}
void serial_sendString(char *str)
{
for(u8 i = 0;str[i] != '\0';i++){
serial_sendByte(str[i]);
}
}
u32 serial_pow(u32 x, u32 y)
{
u32 result = 1;
while(y--){
result *= x;
}
return result;
}
void serial_sendNum(u32 number, u8 length)
{
for(u8 i = 0; i < length; i++){
serial_sendByte(number / serial_pow(10,length - i -1) % 10 + '0');
}
}
int main(void){
char str[50];
u8 test[] = {0x42,0x43,0x44,0x45};
serial_init();
serial_sendArray(test,4);
serial_sendNum(12345,5);
while(1){
}
}
|
printf重定向
如果想要使用printf函数,需要先使用microlib库

注意需要引入stdio头文件,还需要重写fputc
1
2
3
4
5
6
7
8
|
int fputc(int ch, FILE *file)
{
serial_sendByte(ch);
return ch;
}
|
重写完这个函数就可以正常使用printf函数了
如果想要让printf使用多个串口,那么就需要sprintf函数
1
2
3
4
|
sprintf(str,"%x: %hu %hu\n",(u32)adValue,adValue[0],adValue[1]);
serial_sendString(str);
|
为了方便,我们也可以封装sprintf函数,在封装sprintf的时候需要引入头文件stdarg.h头文件。
1
2
3
4
5
6
7
8
9
10
11
|
void serial_printf(char *format, ...)
{
char string[100];
va_list arg;
va_start(arg,format);
vsprintf(string,format,arg);
va_end(arg);
serial_sendString(string);
}
|
解决汉字乱码的情况,如果使用的编码格式为utf-8,则需要先设置编译参数–no-multibyte-chars

接收数据
需要修改初始化函数,分为查询式和中断式
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97
98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
|
void serial_init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = SERIAL_TX_PIN;
GPIO_InitStruct.GPIO_Speed =GPIO_Speed_50MHz;
GPIO_Init(SERIAL_PORT,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Pin = SERIAL_RX_PIN;
GPIO_InitStruct.GPIO_Speed =GPIO_Speed_50MHz;
GPIO_Init(SERIAL_PORT,&GPIO_InitStruct);
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate = 115200;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART2,&USART_InitStruct);
USART_Cmd(USART2,ENABLE);
}
int main(void){
u8 rxData;
serial_init();
while(1){
if(USART_GetFlagStatus(USART2,USART_FLAG_RXNE) == SET){
rxData = USART_ReceiveData(USART2);
serial_printf("receive: %x\n",rxData);
}
}
}
void serial_init()
{
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART2,ENABLE);
GPIO_InitTypeDef GPIO_InitStruct;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStruct.GPIO_Pin = SERIAL_TX_PIN;
GPIO_InitStruct.GPIO_Speed =GPIO_Speed_50MHz;
GPIO_Init(SERIAL_PORT,&GPIO_InitStruct);
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_IPU;
GPIO_InitStruct.GPIO_Pin = SERIAL_RX_PIN;
GPIO_InitStruct.GPIO_Speed =GPIO_Speed_50MHz;
GPIO_Init(SERIAL_PORT,&GPIO_InitStruct);
USART_InitTypeDef USART_InitStruct;
USART_InitStruct.USART_BaudRate = 115200;
USART_InitStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStruct.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;
USART_InitStruct.USART_Parity = USART_Parity_No;
USART_InitStruct.USART_StopBits = USART_StopBits_1;
USART_InitStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART2,&USART_InitStruct);
USART_ITConfig(USART2,USART_IT_RXNE,ENABLE);
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_InitStruct;
NVIC_InitStruct.NVIC_IRQChannel = USART2_IRQn;
NVIC_InitStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_InitStruct.NVIC_IRQChannelPreemptionPriority = 1;
NVIC_InitStruct.NVIC_IRQChannelSubPriority = 1;
NVIC_Init(&NVIC_InitStruct);
USART_Cmd(USART2,ENABLE);
}
u8 serial_rxData,serial_rxFlag;
void USART2_IRQHandler(void)
{
if(USART_GetFlagStatus(USART2,USART_IT_RXNE) == SET){
serial_rxData = USART_ReceiveData(USART2);
serial_rxFlag = 1;
USART_ClearITPendingBit(USART2,USART_IT_RXNE);
}
}
u8 serial_getRxFlag(void)
{
if(serial_rxFlag == 1){
serial_rxFlag = 0;
return 1;
}
return 0;
}
u8 serial_getRxData(void)
{
return serial_rxData;
}
int main(void){
u8 rxData;
serial_init();
while(1){
if(serial_getRxFlag() == 1){
rxData = serial_getRxData();
serial_printf("receive %x\n",rxData);
}
}
}
|
数据包的收发
HEX数据包


文本数据包


实验代码
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
|
void serial_sendPacket(void)
{
serial_sendByte(0xFF);
serial_sendArray(serial_txPacket,4);
serial_sendByte(0xFE);
}
u8 serial_rxData,serial_rxFlag;
u8 serial_txPacket[4],serial_rxPacket[4];
void USART2_IRQHandler(void)
{
static u8 rxState = 0;
static u8 counter = 0;
if(USART_GetFlagStatus(USART2,USART_IT_RXNE) == SET){
u8 rxData = USART_ReceiveData(USART2);
if(rxState == 0){
if(rxData == 0xff){
rxState = 1;
counter = 0;
}
}else if(rxState == 1){
serial_rxPacket[counter++] = rxData;
if(counter >= 4){
rxState = 2;
}
}else if(rxState == 2){
if(rxData == 0xfe){
rxState = 0;
serial_rxFlag = 1;
}
}
}
}
|